
Robots are no longer confined to science fiction or high-end manufacturing labs. They assemble vehicles, perform surgical procedures, sort packages, and even assist in precision agriculture. At the core of this intelligence and motion control lies one essential component: the encoder in robots. Without accurate position and speed feedback, robotic systems would be blind to their own movement, unable to deliver the precision that modern automation demands.
Understanding the Role of the Encoder in Robots
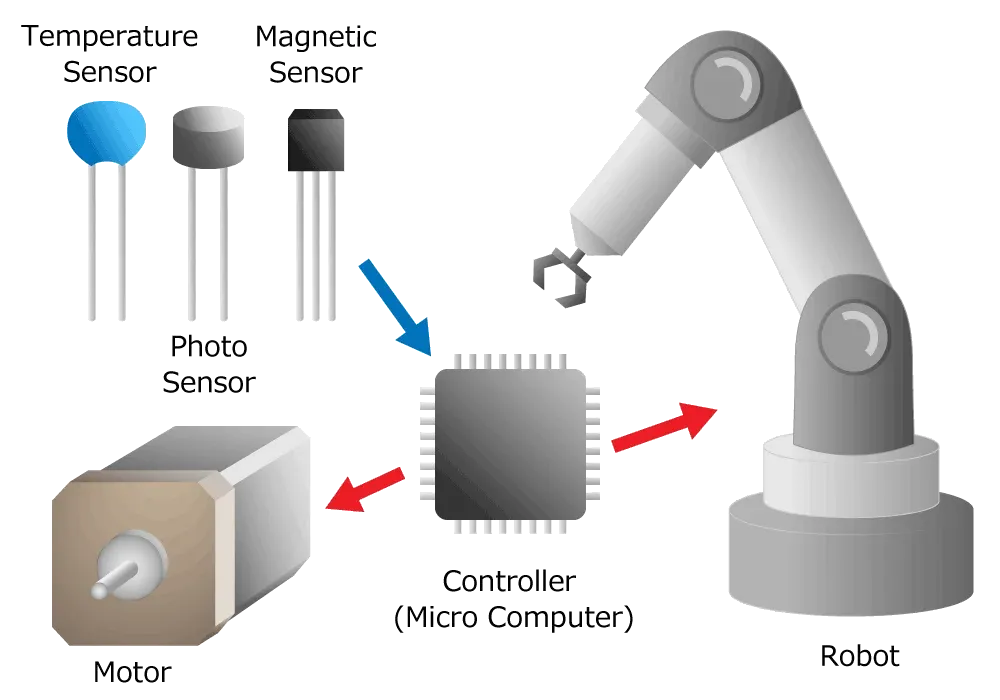
An encoder in robots is a feedback device that converts mechanical motion into electrical signals. These signals allow the control system to determine position, direction, velocity, and sometimes acceleration. In robotic arms, mobile robots, collaborative robots, and humanoid systems, encoders act as the sensory bridge between mechanical movement and digital control logic.
Every robotic joint typically contains a motor, a gearbox, and an encoder. When the motor rotates, the encoder measures that rotation and sends signals back to the controller. The controller continuously compares commanded motion with actual motion. If any deviation occurs, corrections are made instantly. This closed-loop control system ensures that the robot moves exactly as programmed.
Why Precision Matters in Robotic Systems
Precision is everything in robotics. A small positioning error in a six-axis robotic arm can multiply across joints and result in significant end-effector deviation. In applications such as PCB assembly, laser cutting, or surgical robotics, even a fraction of a millimeter matters.
The encoder in robots enables:
- Accurate joint positioning
- Controlled acceleration and deceleration
- Repeatable path movement
- Synchronized multi-axis coordination
Without encoders, robots would operate in open-loop mode, meaning they would send motor commands without verifying actual movement. This would lead to drift, vibration, and inconsistent performance.
Types of Encoders Used in Robots
There are two primary categories of encoders commonly used in robotic systems: incremental and absolute encoders.
Incremental encoders generate pulses as the shaft rotates. The controller counts these pulses to determine position and speed. They are widely used due to their simplicity, cost-effectiveness, and high resolution. Many robotic applications rely on an incremental encoder for real-time motion feedback in servo systems.
- Home EV Charger Installation Guide: Everything You Need to Know
- Encoder in Robots: Types, Working Principle and Applications
Absolute encoders, on the other hand, provide a unique position value for each shaft angle. Even after a power loss, the system knows the exact position immediately upon restart. This is critical in robotic systems where recalibration downtime must be minimized.
How Encoders in Robots Improve Motion Control
Robotic motion is rarely a simple rotation. It involves complex interpolation between axes, dynamic load compensation, and torque management. The encoder in robots feeds continuous data into advanced control algorithms such as PID (Proportional-Integral-Derivative) control or model-based control systems.
For example, when a robotic arm lifts a varying payload, torque demand changes. The encoder detects subtle speed variations caused by load differences. The controller then adjusts motor current to maintain stable motion. This real-time correction prevents jerks, oscillations, and mechanical stress.
In collaborative robots, smooth motion is even more critical. Encoders help detect unexpected resistance or collision by identifying discrepancies between commanded and actual motion. This contributes to safer human-robot interaction.
Encoder Placement in Robotic Architecture
Encoders can be placed in different positions within a robotic system depending on design philosophy and required precision.
Motor-mounted encoders measure motor shaft rotation directly. They are compact and commonly used in servo motors.
Joint-mounted encoders measure output shaft position after the gearbox. This approach compensates for backlash and mechanical tolerances, improving positional accuracy.
Dual-encoder systems combine both methods for higher-end robotics. One encoder monitors motor speed while another verifies joint output, providing redundancy and enhanced precision.
Resolution and Accuracy Considerations
Resolution defines how many pulses or counts an encoder produces per revolution. Higher resolution means finer motion detection. In robotic systems, resolution requirements vary based on application.
High-speed pick-and-place robots may prioritize speed with moderate resolution, while surgical or semiconductor robots require extremely high resolution and accuracy.
However, resolution alone does not guarantee accuracy. Mechanical alignment, signal integrity, noise shielding, and controller processing speed also influence overall performance. Therefore, selecting the right encoder for robots requires evaluating the entire motion control ecosystem.
Environmental Challenges in Robotics
Robots operate in diverse environments, from cleanrooms to heavy industrial facilities. Encoders must withstand dust, vibration, temperature variation, and electromagnetic interference.
- The Complete Solar Energy Guide: Design, and Installation
- 100 Watt Inverter: Everything You Need to Know
In industrial robots used in welding or metal processing, high temperatures and debris demand encoders with robust sealing and shielding.
In medical robotics, compact size and high precision are prioritized.
In outdoor autonomous robots, moisture resistance and durability are essential.
Proper IP ratings, shielded cables, and a stable power supply design ensure reliable encoder performance across environments.
Encoders in Mobile Robots and AGVs
In mobile robots and Automated Guided Vehicles (AGVs), encoders are not limited to joint feedback. They are critical for wheel position tracking and navigation.
Wheel encoders measure rotation to estimate travel distance and direction. Combined with inertial sensors and vision systems, they support localization and path planning algorithms.
Inaccurate encoder feedback in mobile robots can result in cumulative position errors, known as drift. Advanced systems use sensor fusion techniques to correct such errors, but accurate encoder data remains the foundation.
Future Trends in Encoder Technology for Robotics
As robotics continues to evolve toward greater intelligence and autonomy, encoder technology is also advancing.
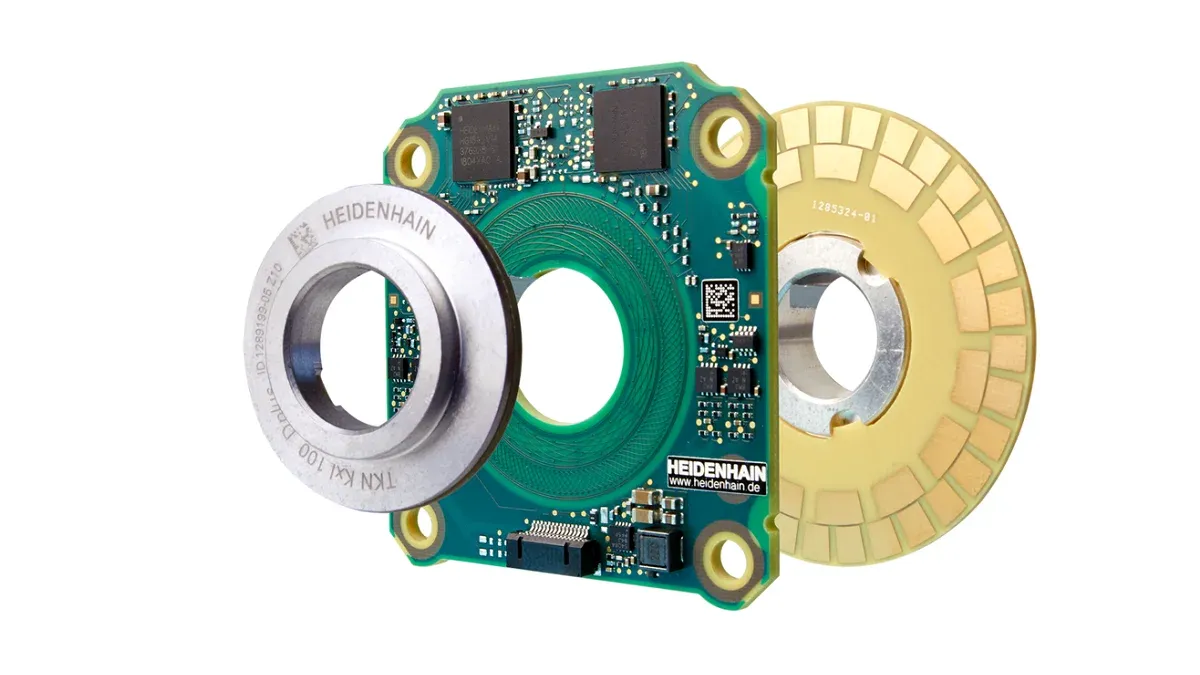
High-resolution optical encoders now offer sub-micron positioning capabilities. Magnetic encoders are becoming more robust and compact for tight robotic joints. Integrated smart encoders can perform onboard signal processing and diagnostics, thereby reducing the controller’s workload.
Emerging technologies include battery-free multi-turn absolute encoders that store position data without external power. This improves reliability and reduces system complexity.
Additionally, integration with industrial communication protocols such as EtherCAT and CANopen allows encoders to transmit data digitally with minimal latency. This enhances synchronization across multiple robotic axes.
Selecting the Right Encoder for Robots
Choosing the correct encoder depends on several factors:
- Required positioning accuracy
- Operating environment
- Space constraints
- Communication protocol
- Budget considerations
For high-precision articulated robots, absolute encoders may be preferred. For cost-sensitive automation arms, incremental designs may offer sufficient performance. In safety-critical robotics, redundant encoder configurations improve reliability.
Engineering teams must also consider long-term maintenance and compatibility with servo drives and controllers.
Conclusion
The encoder in robots is far more than a simple motion sensor. It is the foundation of closed-loop control, precision positioning, and intelligent movement. From industrial robotic arms to collaborative systems and autonomous mobile platforms, encoders transform raw motor rotation into actionable digital intelligence.
As robotics continues pushing boundaries in automation, healthcare, logistics, and advanced manufacturing, encoder technology will remain central to innovation. Higher precision, smarter integration, and improved durability will define the next generation of robotic motion systems.
In every precise robotic movement, there is a feedback device working silently in the background. That device is the encoder, and without it, modern robotics would simply not function.